
”c 点云分割 论文“ 的搜索结果

首先采用基于颜色聚类的方法将图像分割成区域,提取每个区域的Gabor小波纹理特征和灰度共生矩阵纹理特征,接着采用信息熵对特征进行选择,使用选择后的特征对图像区域进行聚类,得到每幅图像的语义特征向量;...



3D点云分割论文阅读(二)——Recurrent Slice Networks for 3D Segmentation of Point Clouds 前言 论文原文链接为:https://arxiv.org/pdf/1802.04402.pdf 注:以下仅为个人想法,如有错误请批评指正。 一、目的 ...
1.点云分割算法的属性 2.点云分割的挑战 3.点云分割算法介绍 01 基于边缘的方法 02 基于区域分割方法 03 基于属性的方法 04 基于模型的方法 05 基于图优化的方法 4.总结 5.PCL点云中的分割模块 参考 摘要...

使用PCL实现的基于凹凸性的LCCP点云分割算法




实例分割对于场景识别而言是重要的一个任务,相比已经成熟发展的2D而言,3D点云实例分割有着很大的发展空间。 本文介绍一下PointGroup这个新的网络架构,文章来自于2020年的CVPR。 提示:以下是本篇文章正文内容,...
首先,我们将此刻的点云表示成P。然后,让P={P1,P2,…,Pk,…,PN}是一组点云,这些点云包含由3D激光雷达传感器获取的当前的N个点,其中每个点Pk由笛卡尔坐标中的k={xk,yk,zk}...论文中,P明确地分为两类:一组。


更加详细的论文翻译:地址 本文提出轻量级高效的大规模点云语义分割算法:RandLA-Net。其单次可处理10610^6106个点,速度相较于基于图的SPG方法快了200倍,且内存占用较小,语义分割精度SOTA。 现有方法均不能处理...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达这是一篇综述性论文,以下只做概述性介绍,介绍文章已共享在微信群和免费知识星球中,文章在公众号将分成三个部分:第一部分介绍点云的获取以...
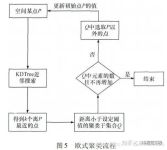
1、排序,基于曲率对点云进行排序,曲率最小的点叫做初始种子点,区域生长算法从曲率最小的种子点开始生长,初始种子点所在区域为最平滑区域,从初始种子点所在的区域开始生长可减小分割片段的总数,从而提高算法的...

作者|高毅鹏 编辑|汽车人原文链接:https://zhuanlan.zhihu.com/p/613155662点击下方卡片,关注“自动驾驶之心”...目前常见的激光点云分割算法有基于平面拟合的方法和基于激光点云数据特点的方法两类。具体如下...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达来源丨点云PCL/导读/在基于激光的自动驾驶或者移动机器人的应用中,在移动场景中提取单个对象的能力是十分重要的。因为这样的系统需...
推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地